




-2.png?w=1024)


A robot does not need legs to clean a room.
Stringman, an open-source DIY robot from engineer Nathaniel Nifong, uses ceiling-mounted cables and a robotic gripper to pick up toys, clothes, and household clutter, according to reports from Interesting Engineering and Hackster.io. The project is not a ready-made home appliance, but it shows how narrow, task-specific robots could reduce the cost and complexity of automation.
That matters as robotics companies pursue humanoid machines capable of doing everything. Stringman points to a less glamorous possibility: the first useful household and workplace robots may be strange, fixed, and very good at one job.
A robot that moves through the room from above
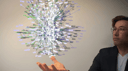
Interesting Engineering (IE) reported that Stringman uses cables suspended from four corners of a room to move a lightweight robotic gripper through the room’s airspace. The system can identify objects, pick them up, and move them to designated drop-off points such as laundry baskets, toy bins, or trash cans.
Hackster.io described Stringman as a cable-driven parallel robot, or CDPR, with anchors that spool and unspool cables to move the end effector in 3D space. “This robot is called Stringman, and it is a CDPR (cable-driven parallel robot),” Hackster.io wrote.
The system uses four “Pilot” anchors with NEMA 17 stepper motors and MKS42C controllers. Each anchor and the Arpeggio gripper include a Raspberry Pi Zero 2 W, while a central computer handles vision and decision-making.
The Arpeggio gripper has two fingers powered by ST3215 servo motors and a four-link design that opens wide and closes in parallel. The gripper sits about 50 centimeters below the pivot point, which helps it reach the floor near furniture.
Why the design matters
Stringman is a DIY home project, not a commercial workplace robot. Its architecture still offers a useful lesson for robotics deployment. A machine does not need a human shape when the task is predictable, the workspace is known, and the goal is simple pick-and-place automation.
Humanoid robots must handle balance, movement, object handling, vision, power, and safety simultaneously. Stringman narrows the problem by using fixed room anchors, four motors, a hanging gripper, and a controlled operating area.
The same design could apply outside the home, especially in places where objects move through predictable spaces. Warehouses, labs, hospitals, offices, and retail back rooms often need repeatable item movement more than general-purpose mobility, and a fixed system could avoid some of the battery and navigation limits that come with floor-based robots.
Ceiling-mounted robots would still bring practical deployment questions. Teams would need safe installation, clear operating zones, local network protections, and rules for use around people.
IE noted that Stringman supports a fully local mode in which video processing and telemetry stay inside the home network, while remote access is available through an online account.
Open source, but not simple
Stringman is built on the open-source LeRobot platform and uses imitation learning. Users can train the robot via teleoperation, enabling it to learn to pick up objects in a specific environment.
According to IE, the software, firmware, mechanical designs, and build instructions are available on GitHub under an Apache 2.0 license. Hackster.io said that a kit costs $1,000 and wrote, “It isn’t plug-and-play and will require a lot of work to get running.”
The limitations are significant. IE emphasized that the machine-vision models still need refinement, flat objects such as books can be hard to grasp, and suspended cables can descend into the room while the robot operates.
Stringman is best viewed as a practical robotics experiment rather than a ready-made appliance. Its bigger point is that useful automation may come from specialized, low-cost systems built around specific tasks instead of waiting for humanoid robots to become affordable.
Read more about how China is testing household humanoid robots that could one day cook, clean, and do laundry.