







The future of robotics may not walk on two legs, four legs, or wings. It may roll in any direction on 20.
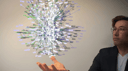
Researchers at Duke University have unveiled “Argus,” a 20-legged experimental robot designed to move equally well in every direction. Unlike humanoid robots or four-legged machines inspired by animals, Argus was built around a different idea entirely: balanced movement from every angle.
The robot’s body consists of 20 telescoping legs extending outward from a central core, with each leg carrying its own depth-sensing camera. The arrangement gives Argus near-complete awareness of its surroundings while allowing it to roll, climb, stabilize, and navigate without needing to turn itself around first.
“Watching Argus move is unlike watching any other robot we’ve worked with,” said Jiaxun Liu, co-first author and Ph.D. student in Duke’s General Robotics Lab. “The first time we saw it navigate among trees and rough terrain, even under heavy collisions, we knew this was something different.”
Built around dynamic symmetry
The Duke team says the robot was created using a mathematical design principle called “dynamic isotropy,” which measures how evenly a robot can accelerate in every direction.
Most modern robots, including humanoids, drones, and quadrupeds, score below 0.6 on that scale, according to the researchers. Argus reportedly reached 0.91, putting it close to the theoretical maximum.
Rather than focusing on appearance, the team prioritized what the robot could physically do from any orientation.
“Most robotics research has framed symmetry as a question about the body, but we argue that the more powerful symmetry is at the level of what the robot can do,” said Boyuan Chen, director of Duke’s General Robotics Lab and lead researcher on the project.
Chen added: “When a robot can accelerate equally well in every direction, it stops needing to face the world in any particular way. Forward and backward become the same. Left and right become the same. The whole problem of robot control changes character.”
The robot’s legs are positioned around a dodecahedron-inspired structure, a geometric form with 12 pentagonal faces, giving the machine a nearly uniform force distribution and visibility in all directions.
Tested on sand, forest trails, and walls
According to the research team, Argus was trained in simulation before being tested in real-world environments around the Duke campus.
The robot successfully rolled across grass, sand, wet ground, forest terrain, and concrete while maintaining stability regardless of orientation. Researchers said it could recover quickly after being pushed and continue operating even after multiple legs were damaged.
In another demonstration, Argus climbed vertically between close walls by alternating pressure and thrust between different groups of legs. The machine also carried a 10-pound payload at near full speed and pushed a large cube while rolling continuously.
The researchers say Argus is intended as more than a single robot prototype. The broader goal is to establish a framework for designing future robots based on balanced movement instead of biological imitation.
“We see Argus as the first member of a much broader family of dynamically symmetric machines,” Chen said. “Robots that don’t need to imitate dogs or humans to be agile, tough and useful.”
For more on where next-generation robotics may be heading, check out eWeek’s coverage of XPENG’s plan to mass-produce humanoid robots across APAC by 2026.